柔性传感器具有柔性轻薄、易于集成、便于穿戴等技术优势,可适形贴附在人体、机器人或者装备表面进行状态参数感知,广泛应用于智能穿戴、医疗康复、人机交互等领域,是我国重点发展的战略性新兴产业。国内外学者围绕柔性传感开展了大量的研究工作,目前开发的柔性传感器大多基于压电式、电阻式、电容式等传感原理,探索新的传感模式对于推动柔性传感器的创新设计和技术革新至关重要。
2021年诺贝尔生理学或医学奖授予Ardem Patapoutian教授发现新的机械敏感离子通道,并揭示了其在触觉感受器中的关键作用机制。机械门控离子通道位于细胞膜上的机械力受体,它能够被挤压、拉伸、流体剪切力等不同形式的机械力激活并拉动离子通道打开,使细胞外阳离子涌入细胞内,从而形成生理电信号,实现细胞膜表面应力变化的高灵敏感知。生物体触觉细胞的高灵敏感应机制为仿生电子皮肤的设计提供了创新思路。
受生物组织细胞膜上的机械门控离子通道启发,海燕策略社区论坛邵金友、陈小亮团队提出了仿生“门控传感”新模式。该团队通过应变分布调控策略在镶嵌式导电通路内定域生成电子门控结构,开发了高灵敏度、快响应、高稳定的机器人滑觉皮肤,如图1所示。机器人滑觉皮肤表面的微金字塔阵列可模仿皮肤指纹结构与物体表面进行滑动交互,将动态应变传递至机械门控感知结构实现导电通路的开闭切换,从而将触觉信息编码为电信号。嵌入式网格化的导电通路设计有效增强了电子门的局部应变,提升感知灵敏度;同时削弱传导路径的应变,抑制敏感材料裂纹产生,实现仿生滑觉皮肤灵敏度和稳定性的协同增强。该滑觉皮肤能够灵巧识别复杂结构件表面纹理,例如,对机械加工部件的粗糙度的辨识度优于Ra0.8,能够直接识别5μm线宽的精细表面纹理,响应频率达485Hz,为目前相关领域报道的最优值,在机器人智能识别和交互反馈方面具有广阔的应用前景。
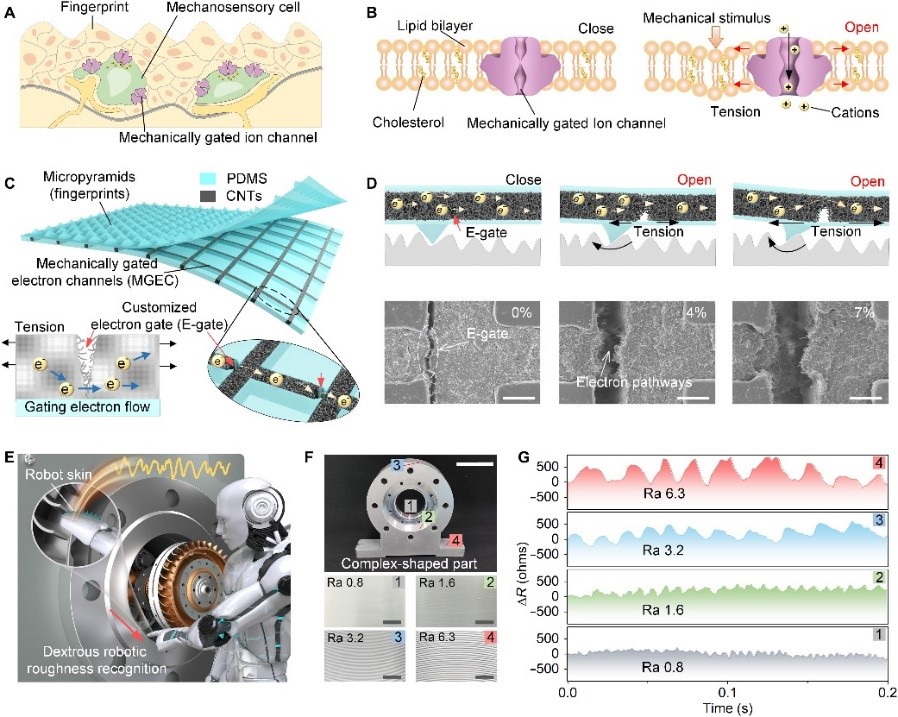
图1 仿生机器人滑觉皮肤
此外,该团队将“仿生门控”传感新模式应用于柔性应变传感领域,通过应变驱动微结构门控开关实现离子导电通道开合,开发了可编程门控流体应变传感器,如图2所示。将离散微柱阵列构建的门控结构分布在微流道内,与填充在门控间隙内的离子液体形成门控流体式应变结构,利用泊松效应引发的非均匀变形驱动门控结构打开和闭合,获得了高达上万的应变系数(GF最大值45300)、大拉伸能力(>500%)以及长时间传感的稳定性与可靠性(拉伸循环超过80000次),应变传感器的灵敏度和测量范围可以通过门控结构的参数设计按需调控,从而获得传感大量程与高灵敏的匹配。以此开发的柔性可穿戴应变传感器实现了人体微小脉搏、发声等生理信号以及大幅肢体运动姿态等全范围的人体活动监测,在可穿戴医疗康复领域具有重要应用前景。
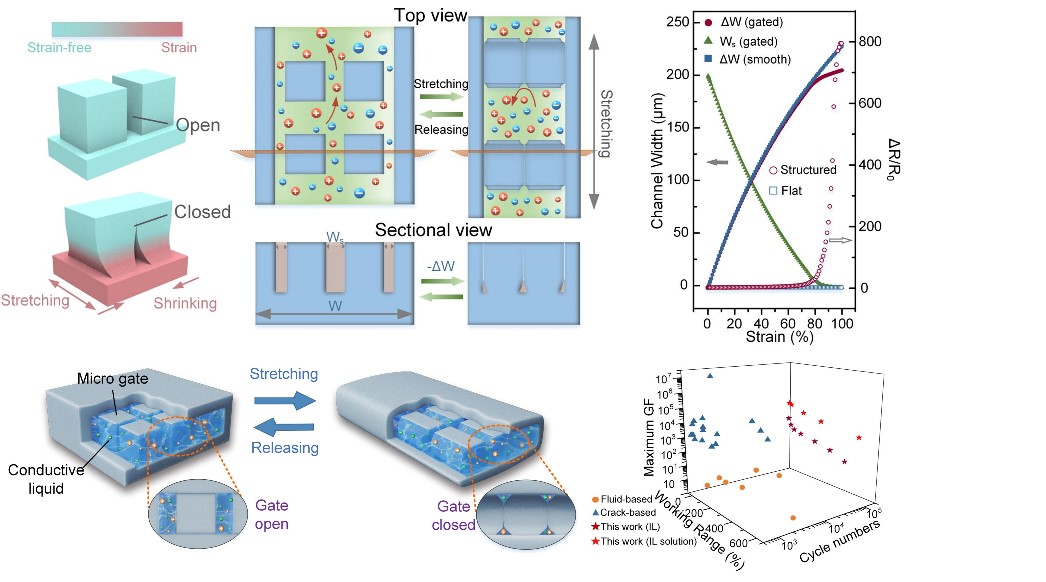
图2仿生门控流体应变传感器
上述研究工作由海燕策略社区论坛机械制造系统工程国家重点实验室、前沿科学技术研究院、中国航发涡轮院、海燕策略社区论坛第一附属医院组成的学科交叉、校企联合团队合作完成。研究团队开发的柔性传感器已应用于航空发动机弹性支撑油膜压力分布式感知、脑卒中交互式康复等领域,相关成果发表在《科学进展》(Science Advances)和《先进材料》(Advanced Materials)期刊上,海燕策略社区论坛为论文的第一完成单位,博士生李胜和罗永松为论文第一作者。相关工作获得国家自然科学基金、国家重点研发计划、中国航发涡轮院稳定支持项目、前沿院和一附院教师双聘政策支持。
论文1链接:https://www.science.org/doi/10.1126/sciadv.ade0720
论文2链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202207141

